
めんどくさくて先延ばしにしていたディフレクターのプログラムとギミック作成しました。
最近はこの記事ばかりですみません。あと少しで終わりそうですので今しばらくお付き合いください。

まずはサーボ一にそれぞれ専用の回路を組んで、それをメインのAVRでコントロールする方法でやってみました。
サーボそれぞれのコントロールにはAttiny13Aを使用しました。
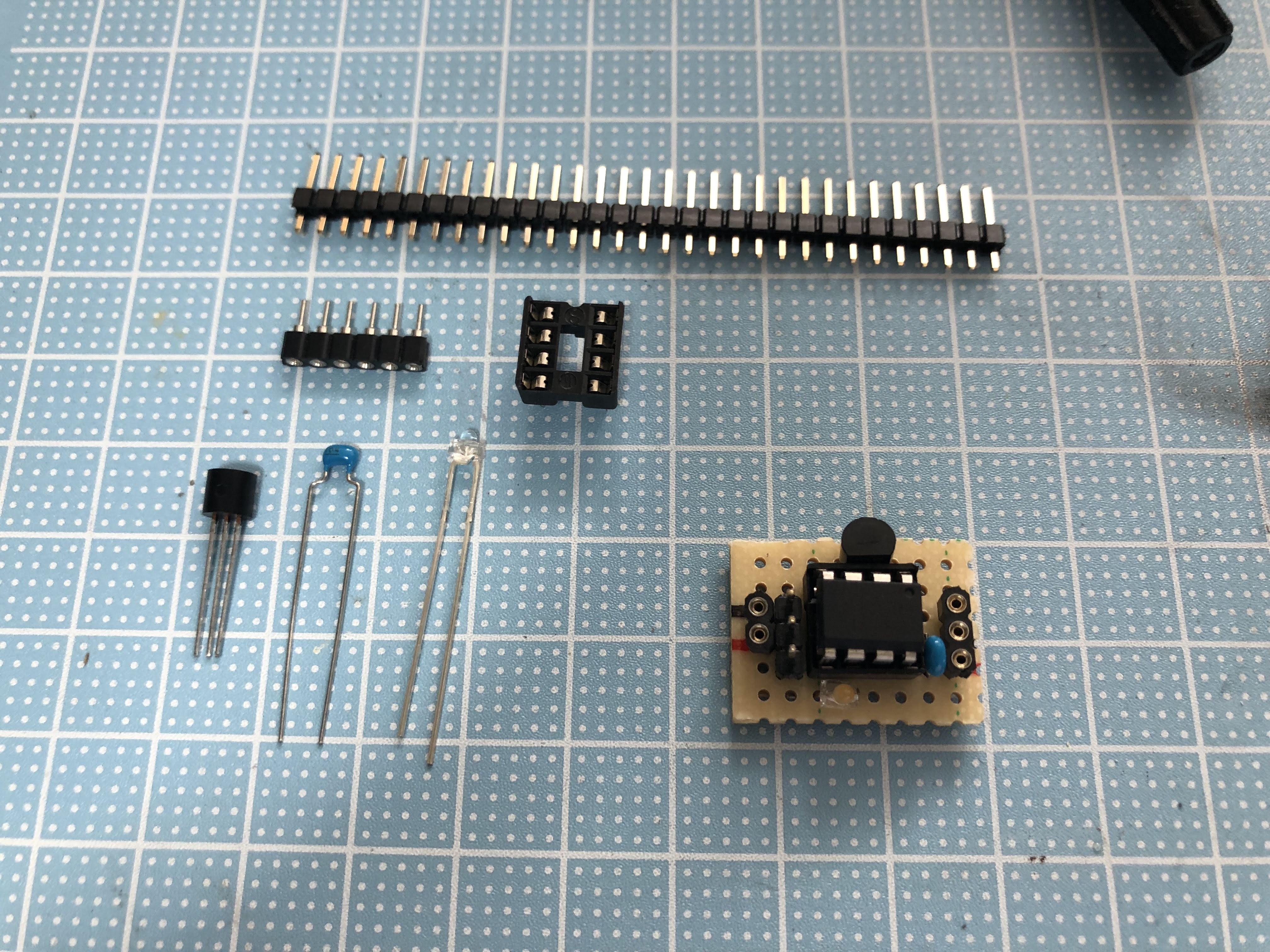
このAttiny13Aでサーボの角度とスピードを制御します。
これにメインのAttiny2313からの信号(ON/OFF)を受けて動かすことにしました。
それぞれのサーボの稼動タイミングはAttiny2313の方で制御します。
ブレッドボードでのテストも面倒なのでいきなり基盤作製して配線w
(ちなみにこのおごりが後日問題にw)

サーボの電源とAVRの電源はきっちり分けたので配線が多くなってしまいますw
相変わらず配線の整理へたくそです・・・・・。
とりあえず、配線をまとめて記念撮影(先ほどの写真と上下が逆になっています)

で、早速稼働してみたのですが、意外とこれうまく動きましたw
これでもいいかな~と思っていたのですが、サーボを動かす電源は5Vのアダプターから取るとして、AVRを動かすための電源を確保するのにトムキャットの機体を動かす9Vのアダプター側から(減圧して)もらおうと思うのですが、AVR7個を動かすとなるとなるとちょっと電流取り過ぎかなと思い、せっかくなのでVividさんが提供されているLEDマネージャ(こちらから入手できます。)も試してみようとプログラムを改変させてもらいサーボ6個に対応するようにしました。

PIC1個で6個のサーボを制御しています。こちらの方が電源問題少なそうです^^。
ちなみにもちろんAVR1個でもサーボ6個の制御は可能なんですよ!
ただ私にはできないだけでw

ちなみにサーボの位置が変わっていますが、これはプログラムの改変時にサーボの回転方向がこちら向きが調整しやすかったからですwまっ、要は私のプログラミング能力不足の結果ですw
で、このPIC用の回路もAVRの回路もすんなりできたから大丈夫だろうと同じくブレッドボードでテストせずに組んでみたのですが・・・・・・まともに動かないw
回路を何度も確かめて、プログラムも何度も確かめたのですがわからない・・・。
2日位悩みましたw
実は、サーボの起動用にスイッチを付けているのですが、ここにプルアップル抵抗を入れ忘れていました^^;ブレッドボードでちゃんとテストしないからw
言い訳しますと^^;AVRは内部でプルアップ出来るのでいつもプログラムでプルアップして、外部にプルアップ抵抗取り付けたことがないんです。PICの回路に慣れていなかったのでそこではまってしまいました^^;
で、実際のサーボの動きと範囲を見ながら数値の調整をしてなんとか動く様になりました。
今回ディフレクターが1枚づつ起き上がっていくようにしたのですが、実物は全てが一緒に動くんですよね^^;
とりあえず最終バージョンとしてこんな感じにしました。
まっ、見た目的にはこちらの方がかっこいいのでこれでいくことにしたのですが、実を言いますと、このプログラムはスイッチ一つで全部が同時に起き上がる設定にもできる様にしています。

基盤の矢印部分のショートさせている配線を抜くと全部が一斉に起き上がる様になっているのですが、実際に動かしてみると
てな感じで誤作動しまくりですw
サーボを動かす電源は5V-1.0Aのアダプターを使用してPICは別の電源で5Vをかけています。
あのショート部分を外しただけで全ての条件は一緒なんですけどね^^;
やはりアダプターの電流量が一時的に足りなくなったりして誤作動を動かすのでしょうか?
モーターは動き始めに一時的に大きな電流を必要としますがその辺と関係があるのでしょうかね???
とりあえずずらして動かす場合は問題ないのでこれでいくことにします^^。
あと、トムキャットをプチ改造w
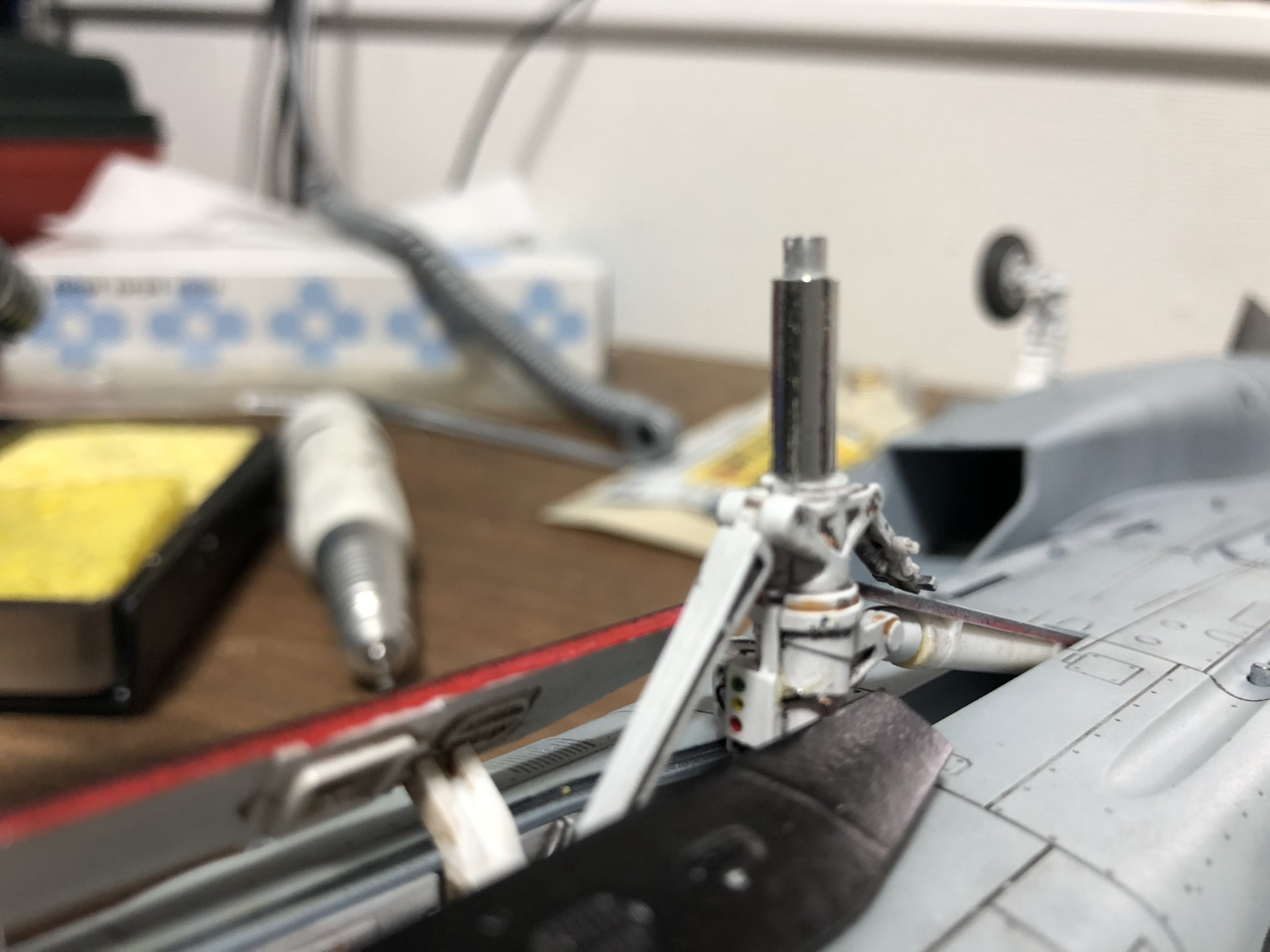
例のノーズギアですが、短くしたため引き込むときにノーズギアの蓋のヒンジ部分に干渉してうまく引き込めそうにありません。やはり通常の長さの状態の写真も撮りたいな・・・ということで、
ギアの一番底の部分(シリンダーの底)タイヤを取り付けるところですね。

ここにアルミ線でヒンジを作って

この部分、シリンダーの長さによって角度が変わるので稼働しないといけないんですよね^^;
で、機体のほうのノーズギアはシリンダー部分を全て削除して内部にアルミパイプを埋め込みました。

で、そのアルミパイプがちょうど入るプラパイプを切り出して、先ほどヒンジを作ったパーツに貼り付けこれをシリンダーのピストン部分とします。

これで、シリンダーが縮んでいる状態。
ヒンジを作ったパーツを直接ノーズギアのアルミパイプに取り付けます。

次にシリンダーが伸びている状態。
まずはミラーフィニッシュを貼ったプラパイプを取り付けて、
先ほどのヒンジをつけたパーツをさらに繋ぎます。

この時ヒンジをつけた部分のパーツの角度が変わっています。
要は、ミラーフィニッシュを貼ったプラパイプを間に挟むことによってシリンダーの伸び縮みを再現した感じですw(つなぎ目見えますがw)
もともとこのトムキャットは透明な支えで支持していますので、ギアには負担がかかりませんから強度的にはこれで十分そうです^^。
これでとりあえずは、元の状態も再現できる様になりましたが、ローンチバーはやはりギア収納前には手動で上にあげないといけませんw
しかし、このシリンダー部分目分量で伸ばしたのですが、一番最初に長さ測っておけばよかったと少し後悔していますw
関連すると思われる記事:
- None Found
こんばんは
まずは、デフレクター動作成功、おめでとうございます。
一枚ずつデフレクターがせりあがっていく様は、もう、カッコイイの一言です。壮観です!
また、ノーズギアの工作も綺麗にされていて、しかもギア伸縮式なんて、すごいアイデアですね。
PICでのサーボの同時動作がうまくいかない様子ですが、
parameter[portcnt][2] で指定されている数字はゼロのままでしょうか?
もしそうなら、ここに10とか15位を設定してみた場合はいかがでしょうか? 動作をゆっくりさせる設定です。
また、サーボの定義を6個から2-3個に減らした設定 (parameterのサーボ設定を外す)ではどうでしょうか?
ソフトは、一つのサーボのパルス1個を送出するのにタイマーセットの上、割り込みで処理していますので、同時に6個動作させると同じサーボに次のパルスが来るまでに時間がかかり、ぎこちない動作になっているのかもしれません。
お早うございます。
カタパルト超格好いいです!! 見ていてあきないですね!
本体もさることながらデカいジオラマの工作技術は凄いの一言です!!
これは絶対に真似ができないですね。
あっ ジーッと見ているとガンダムかなにかロボットが動いてる感じに見えるのは私だけ? (^^ゞ
Vividさん こんばんは!
バラバラとなんとか動いてくてれいます^^。
このバラバラの動きの時は安定していてあまり誤作動とかはないのですが、
見てもらいましたように全体で動かすとこの通りですw
ノーズギアはやはり引き込みたいと思いこの様な方法にしてみました^^。
えっとparameter[portcnt][2]はtagetの数値が入る所と思いますので、サーボの回転スピードとなるとstepであるsv_para[npc][0]の部分と思いますが、ここを1より小さくはまだやっていないので、また試してみようと思います。floatですから小数点が入れられるんですよね。
サーボの個数を減らすのは試してみましたが、安定していました。
確かにサーボ6個となると、割り込みの時に時間がかかりすぎてぎこちなく動いている可能性もあるのかもしれませんが、思うにLEDマネージャーのプログラムよりもギミックを動かすためのサーボにかかる負荷が関係あるのかもと思っています^^;実はサーボ6個でも負荷がない時は比較的安定して動いているのに気が付きました。ギミックに組み込んで負荷をかけた途端あの感じですw
まっ、どうしても同時に動かしたい時は6個のうちの1番と6番のサーボのみ稼働にしてディフレクター板に真鍮線などを入れて連結してしまえばいけそうです^^。
ottoさん こんばんは!
ありがとうございます!
わたし的にはottoさんの様な細かく緻密な作業の方が驚異的ですよ!
大きなジオラマは多少なんかあってもごまかせますからねw
稼働部分が関節の様に見えるのでロボット的な何かのような感じを受けるかもですねw
こんばんは。
サーボ設定配列の内容を忘れていました。6jiroさんのほうがお詳しいです(笑)
何らかの理由でサーボの動作が若干ぎこちなくて、デフレクターが大きく振られているのでしょうね。
Vividさん こんばんは!
つい先日までプログラムいじってましたからねw
あれからもたくさんのプログラムを作成されたので間違っちゃいますよね^^。
Vividさんのおかげでサーボのプログラムもいじって調整できる様になりまっしたのでほんとありがたいです。
ありがたいことに現在は安定していますのでこれで行こうと思います。
そうですね。サーボのチョツトした動きがディフレクターで大きく再現されますからね〜。
思った通り、すさまじくカッコイイ!!
順番に動くデフレクター、まるでエヴァのワンシーンのようです。
そして、バラバラに上がってくるバージョンの方は、カワイイ^^
私も、ATtiny使いたくて勉強初めました。
いくつか注文買したのですが、米粒のように小さいATtiny10というのが
ちょっと面白そうです。
gyoさん こんばんは!
ありがとうございます!
実物は一斉に起き上がるのですが、見た目的に順番に起き上がる方がカッコいいのでこれを採用していますw
同時のバージョンは・・・・・wただ、これも1番6番の両端のサーボを動かしてディフレクターを連結してしまえば可能な様です。
おっ!AVRにトライですね!
確かにarduinoも小さくなって仕込める場所が増えましたが、Attiny10レベルの小ささは無理ですからね^^;。ところでAttiny10は足が6ですので、プラス、マイナス、リセット端子意外となると使えるのが3端子しかないので使うには端子が少なすぎるかもです。あの小ささはどこでも仕込めますがねw
ちなみに2mm程度大きくなりますがAttiny85なら8端子ありますので、応用が効きやすいかもです。むかしサンダーバード4号で以前Attiny85を使った時の記事がこちらです。プログラムも載せていますので、もしご興味がありましたらどうぞ^^。
今になって、昨年のあの記事の偉大さと重宝さを再認識しております!
85も同時に買ってきたので、これは大きなキット組み込み用で使う予定です。
ATtiny10は、3ミリ角というサイズを生かすために、パッケージに組まないで裸で使う予定なのですが、
無理してこのサイズを使う意義のあるネタがなかなかないというw
6jiroさんみたいに、動かしながらスタンドアローンで何かする、というギミックであればいいのですが、
固定モデルは、舞台裏に全部仕込んで配線出してやれば済んじゃうので・・・
一応、SW EP6のマザーシップ格納庫のマットペインティング再現ジオラマを来年夏に向けて準備中なので、
移動しているビークルX-WINGのコクピット点滅にでも使おうかなくらいです。
なんかいいネタないですかねー
gyoさん こちらでもこんばんは!
確かにAttiny10サイズを生かす意義のある電飾はなかなか少ないですよね。スタンドアロン形式だと電池と場合によっては電圧の昇圧装置を入れないといけないので、やはりそれなりにスペースはとっちゃいますよね^^;
まっ、舞台裏に出す配線が減りますのでその辺で応用範囲は多少広がるかと^^。
うを!SW EP6のマザーシップ格納庫ですか!これまたすごい計画が立ち上がっていますね!
むちゃくちゃ楽しみです!!